...A contribution to a repository from a teacher who uses LEGO® Education equipment on a daily basis.
Note: Whenever the author obtains new information on topics already published, he updates the pages already published, not creating new ones. Use the search box to get all the information. The update date is at the end of the message.
Com este post pretendo dar início à apresentação do software Robolab, o qual era usado em contexto educativo, para a aprendizagem de programação usando o tijolo programável RCX da LEGO® Education (inicialmente LEGO® DACTA).
Para obter a versão Robolab para Mac, clique aqui.
With this post I intend to start the presentation of the Robolab software, which was used in an educational context, for learning programming using the LEGO® Education RCX programmable brick (initially LEGO® DACTA)
Primeiro, a palavra a Chris Rogers, cocriador do Robolab. Aqui numa googletalks:
RoboLab é o nome do programa criado pela LEGO Group em parceria com a National Instruments (NI), a Tufts University e a LEGO® Education (na época LEGO® Dacta).
Este programa educativo tinha por base o software LabView da NI.
Em contexto escolar, era necessário criar conjuntos LEGO® com atividades base, os quais necessitariam de um conjunto de peças, livros de instruções de montagem e livros pedagógicos para uso do professor dinamizador da atividade.
Assim foram criados conjuntos de RoboLab. Estes continham peças, instruções de montagem e claro um programa para controlar o RCX que é o tijolo programável de toda esta gama.
Como RCX foi vendido em caixas individuais (a 9709), ele não estava presente nas caixas base, a não ser que a escola comprasse um conjunto especial no qual o conjunto era acompanhado por 4 RCX e respectivas torres de comunicação. Deste modo houveram pacotes específicos que continham caixas base com 4 RCX (sets 990682 [com torre USB, datado de 2002] e 990084 [com torre porta de série]), denominado RoboLab Starter System. Estes dois conjuntos faziam-se acompanhar de igual modo de um exemplar do software RoboLab, e de 4 livros dedicados à aprendizagem da robótica (1livro "Robotic Systems - a concept guide"- 2000041) e do software (3 livros).
Concept guide - Robotic Systems
2000041
(teve 3 edições 1998, 2002 e 2005 em língua inglesa, contudo foi lançado em outras línguas)
número de impressão da 1ª edição - 4.122.191
um exemplo, a versão em sueco do Concept Guide
outro exemplo, a versão em castelhano do Concept Guide
RoboLab is the name of the program created by the LEGO Group in partnership with National Instruments (NI), Tufts University and LEGO® Education (at the time LEGO® Dacta). This educational program was based on NI LabView software. In a school context, it was necessary to create LEGO® sets with basic activities, which would require a set of pieces, assembly instruction books and pedagogical books for use by the teacher who was responsible for the activity. Thus RoboLab sets were created. These contained parts, assembly instructions and of course a program to control the RCX, which is the programmable brick of the entire range. As RCX was sold in individual boxes (at 9709), it was not present in the base boxes, unless the school purchased a special set in which the set was accompanied by 4 RCX. In this way, there were specific packages that contained base boxes with 4 RCX (sets 990682 [with USB tower, dated 2002] and 990084 [with serial port tower]), called RoboLab Starter System. These two sets were also accompanied by a copy of the RoboLab software, and 4 books dedicated to learning robotics (1 book "Robotic Systems - a concept guide" - 2000041) and the software (3).
set 990084
A primeira caixa base do RoboLab é a seguinte:
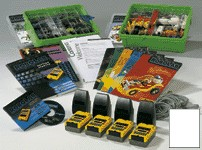
9780 - RoboLab Starter Building System (1998) foi reeditado em 2001 - Conjunto muito vasto, vem em duas caixas verdes de plástico, fazia-se acompanhar de 5 livros de instruções, para cinco construções. Compunha-se de 1702 peças. Este conjunto, embora seja vendido durante anos, possui duas edições distintas que caracterizam toda a sua gama, incluindo o livro do professor. A versão denominada RoboLab (a primeira) e a versão LEGO® MindStorms for the Schools (a segunda).
The first base box of RoboLab is as follows: 9780 - RoboLab Starter Building System (1998)was reissued in 2001 - Very large set, comes in two green plastic boxes, accompanied by 5 instruction books, for five constructions. It consisted of 1702 pieces.This set, although sold for years, has two distinct editions that characterize its entire range, including the teacher's book. The version called RoboLab (the first) and the LEGO® MindStorms for the Schools version.
o conjunto completo (primeira versão) (foto só do conjunto 9780)
caixa 1 (primeira versão)
caixa 2 (primeira versão)
Este conjunto possibilita a realização de cinco construções. Deste modo era acompanhado por cinco livros de instruções, a saber: The Bug, The Car, the Gadget, My Home e Torbot (as primeiras imagens são da primeira edição, as imagens individuais são da segunda versão).
This set makes it possible to carry out five constructions. In this way it was accompanied by five instruction books, namely: The Bug, The Car, the Gadget, My Home and Torbot (images are from the first edition).
as duas caixas e os cinco livros de instruções (primeira versão)
Os cinco livros de instruções da 2ª edição , 2001
My Home - 1999 and 2001 - ref: 4.178.844
The Gadget - 1999 and 2001 - ref: 4.178.843
The car - 1999 and 2001 - ref: 4.178.842
The bug - 1999 and 2001 - ref: 4.178.845
The Torbot - 1999 and 2001 - ref: 4.178.841
Os cinco livros de instruções da 1ª edição , 1999
The Torbot - 1999 - ref: 4.128.492
The Car - 1999 - ref: 4.128.492
My Home - 1999 - ref: 4.128.492
The bug - 1999 - ref: 4.128.492
The Gadget - 1999 - ref: 4.128.492
Para dinamizar as atividades os professores possuíam um dossier com fichas de motivação e fichas de atividades, incluindo nestas as fichas para dar aos alunos. Este manual, com 274 páginas, era vendido em separado (primeiramente 909780, posteriormente 2009780).
Este conjunto possibilita, com os 4 RCX recomendados, dinamizar atividades para 16 alunos. Cada grupo de 4 alunos trabalha um dos conjuntos (por isso a caixa traz as peças separadas por construções nos tabuleiros superiores), e no fim da execução das atividade A,B,C, D (ou seja 26 atividades) de cada construção (carro, insecto, casa e máquina), as contruções rodavam entre os diversos grupos, como é sugerido no próprio livro do professor. Ou seja, este conjunto possibilita um enorme recurso de aulas (sem contar com as introdutórias, que são 9, as atividades possíveis são 104, e ainda há duas de desenvolvimento finais, cada uma usando uma das caixas) para um conjunto de 16 alunos, o que é extraordinário pedagogicamente.
To streamline the activities, the teachers had a dossier with motivation sheets and activity sheets, including the sheets to give to the students. This manual, with 274 pages, was sold separately (first 909780, later 2009780).
This set makes it possible, with the 4 recommended RCX, to streamline activities for 16 students. Each group of 4 students works on one of the sets (that's why the box brings the pieces separated by constructions on the upper boards), and at the end of the execution of activities A,B,C,D (or 26 activities) of each construction (car , insect, house and gadget), the constructions rotated between the different groups, as suggested in the teacher's book. In other words, this set allows a huge resource of classes (not counting the introductory ones, which are 9, the possible activities are 104, and there are still two final development, each using one of the boxes) for a set of 16 students, which is pedagogically extraordinary.
livro do professor, as duas edições (2009780 -
código de impressão - 4150542)
livro do professor, edição espanhol de 1999 (2009780 - ES
código de impressão - 4510511)
Foi lançado um conjunto de peças o "Bug Project Set",
o 970676, com 83 peças.
Foi lançado um conjunto de peças o "House Project Set",
o 970675, com 80 peças.
Foi lançado um conjunto de peças o "Car Project Set",
o 970674, com 79 peças.
Foi lançado um conjunto de peças o "Gadget Project Set",
o 970677, com 48 peças.
Foi lançado um quadro magnético com os icons do RoboLab para apoiar a programação
o "Robolab Icon Magnets", com um marcador (imagem com fraca qualidade).
9780 - the bug
Por fim, cabe aqui referir que todas as propostas de programação associadas às atividades deste conjunto estavam incluídas na versão do software RoboLab, bem como as dos conjuntos 9723 e 9725. Segue-se uma grelha com os conceitos chave que eram abordados no LEGO DACTA Robotics System Teacher Notes and Copymasters for set #9780.
Key Concepts in the ROBOLAB
Starter System Set Activity Pack
(page 12 of teachers book)
Este gráfico mostra quais conceitos são cobertos pelas atividades. Todas as atividades do Starter Set são organizadas em três tipos: Toda a classe (todos trabalhando juntos em uma ideia comum), Unidades (são quatro conjuntos de atividades em pequenos grupos) e temas maiores para projetos de resolução de problemas em grupos maiores. Cada atividade é rotulada por um número, por exemplo, 1, 2 e uma unidade A, B, C ou D.
This chart shows which concepts are covered by the
activities. All activities in the Starter Set are organized into three types:
Whole Class (all working together on a common idea), Units (these are four
sets of small group activities) and larger themes for larger group
problem-solving projects. Each activity is labeled by number e.g., 1, 2 and a
unit A, B, C or D.
Key Concepts
Whole Class Activities
Unit 1
Unit 2
Unit 3
Unit 4
Themes
RCX Built-in programs
1A, 2A, 3A
RCX/Computer set-up
1A, 4A, 5A, 6A
Troubleshooting, debugging
6A
Simple output control (1 motor or lamp)
1A, 2A, 3A, 7A, 8A
Multiple output control (more than 1 motor or lamp)
8A
2B, 3B, 4B, 5B, 6B
2C
All
Projects 1, 2
Simple feedback (1 sensor, either touch or light)
6, 7
7A
1B, 4B
2C
All
Projects 1, 2
Multiple feedback (more than 1 sensor)
7
2B, 5B, 6B
Sensors - light
(My Home, Gadget)
5B, 8B
All
Projects 1, 2
Sensors - touch (Car, Bug, Gadget)
3A
3B
Continuous Run
2B
Loops
5C
Forks (conditionals)
6, 7
5C, 6C
Multitasking
6C
Sound and Music
5C, 6C
Projects 1, 2
Output power
1B
All
All
Projects 1, 2
Output (motor) direction
7A
1B
Projects 1, 2
Save programs
2B
Print programs
2B
Plan and implement programs
2B, 4B, 5B, 6B
2C
1D, 2D, 3D
Projects 1, 2
Design and program own inventions
5B, 6B
2D, 3D
Projects 1, 2
Using Timers
7A
Recognizing robots
1
Robotic body is related to function
2
Robots require instructions for behavior
3
Programs are instructions
4
Identify inputs and outputs
5
Sensors provide various types of input
5
Recognizing systems
6
Robotic Systems are constrained by many factors
8
Probes are devices equipped with sensors
8
Complex behavior can result from the interaction of
simple rules
9
Finally, it is worth mentioning that all programming proposals associated with the activities of this set were included in the RoboLab software version, as well as those of sets 9723 and 9725.
Vídeo publicitário de divulgação do Robolab
Livrete publicitário ao LEGO MindStorms for Schools