

um exemplo, a versão em sueco do Concept Guide

outro exemplo, a versão em castelhano do Concept Guide
This educational program was based on NI LabView software.
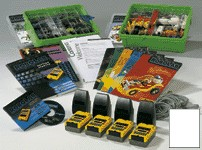
In a school context, it was necessary to create LEGO® sets with basic activities, which would require a set of pieces, assembly instruction books and pedagogical books for use by the teacher who was responsible for the activity.
Thus RoboLab sets were created. These contained parts, assembly instructions and of course a program to control the RCX, which is the programmable brick of the entire range.
As RCX was sold in individual boxes (at 9709), it was not present in the base boxes, unless the school purchased a special set in which the set was accompanied by 4 RCX. In this way, there were specific packages that contained base boxes with 4 RCX (sets 990682 [with USB tower, dated 2002] and 990084 [with serial port tower]), called RoboLab Starter System. These two sets were also accompanied by a copy of the RoboLab software, and 4 books dedicated to learning robotics (1 book "Robotic Systems - a concept guide" - 2000041) and the software (3).
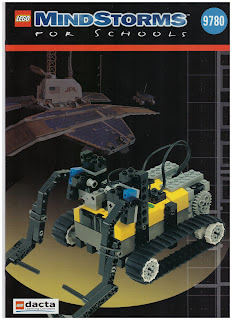
- 9780 - RoboLab Starter Building System (1998) foi reeditado em 2001 - Conjunto muito vasto, vem em duas caixas verdes de plástico, fazia-se acompanhar de 5 livros de instruções, para cinco construções. Compunha-se de 1702 peças. Este conjunto, embora seja vendido durante anos, possui duas edições distintas que caracterizam toda a sua gama, incluindo o livro do professor. A versão denominada RoboLab (a primeira) e a versão LEGO® MindStorms for the Schools (a segunda).
The first base box of RoboLab is as follows:
9780 - RoboLab Starter Building System (1998)was reissued in 2001 - Very large set, comes in two green plastic boxes, accompanied by 5 instruction books, for five constructions. It consisted of 1702 pieces.This set, although sold for years, has two distinct editions that characterize its entire range, including the teacher's book. The version called RoboLab (the first) and the LEGO® MindStorms for the Schools version.


caixa 1 (primeira versão)



















|
Key Concepts in the ROBOLAB Starter System Set Activity Pack (page 12 of teachers book) Este gráfico mostra quais conceitos são cobertos pelas atividades. Todas as atividades do Starter Set são organizadas em três tipos: Toda a classe (todos trabalhando juntos em uma ideia comum), Unidades (são quatro conjuntos de atividades em pequenos grupos) e temas maiores para projetos de resolução de problemas em grupos maiores. Cada atividade é rotulada por um número, por exemplo, 1, 2 e uma unidade A, B, C ou D. This chart shows which concepts are covered by the
activities. All activities in the Starter Set are organized into three types:
Whole Class (all working together on a common idea), Units (these are four
sets of small group activities) and larger themes for larger group
problem-solving projects. Each activity is labeled by number e.g., 1, 2 and a
unit A, B, C or D. |
||||||
|
Key Concepts |
Whole Class Activities |
Unit 1 |
Unit 2 |
Unit 3 |
Unit 4 |
Themes |
|
RCX Built-in programs |
|
1A, 2A, 3A |
|
|
|
|
|
RCX/Computer set-up |
|
1A, 4A, 5A, 6A |
|
|
|
|
|
Troubleshooting, debugging |
|
6A |
|
|
|
|
|
Simple output control (1 motor or lamp) |
|
1A, 2A, 3A, 7A, 8A |
|
|
|
|
|
Multiple output control (more than 1 motor or lamp) |
|
8A |
2B, 3B, 4B, 5B, 6B |
2C |
All |
Projects 1, 2 |
|
Simple feedback (1 sensor, either touch or light) |
6, 7 |
7A |
1B, 4B |
2C |
All |
Projects 1, 2 |
|
Multiple feedback (more than 1 sensor) |
7 |
|
2B, 5B, 6B |
|
|
|
|
Sensors - light (My Home, Gadget) |
|
|
5B, 8B |
|
All |
Projects 1, 2 |
|
Sensors - touch (Car, Bug, Gadget) |
|
3A |
3B |
|
|
|
|
Continuous Run |
|
|
2B |
|
|
|
|
Loops |
|
|
|
5C |
|
|
|
Forks (conditionals) |
6, 7 |
|
|
5C, 6C |
|
|
|
Multitasking |
|
|
|
6C |
|
|
|
Sound and Music |
|
|
|
5C, 6C |
|
Projects 1, 2 |
|
Output power |
|
|
1B |
All |
All |
Projects 1, 2 |
|
Output (motor) direction |
|
7A |
1B |
|
|
Projects 1, 2 |
|
Save programs |
|
|
2B |
|
|
|
|
Print programs |
|
|
2B |
|
|
|
|
Plan and implement programs |
|
|
2B, 4B, 5B, 6B |
2C |
1D, 2D, 3D |
Projects 1, 2 |
|
Design and program own inventions |
|
|
5B, 6B |
|
2D, 3D |
Projects 1, 2 |
|
Using Timers |
|
7A |
|
|
|
|
|
Recognizing robots |
1 |
|
|
|
|
|
|
Robotic body is related to function |
2 |
|
|
|
|
|
|
Robots require instructions for behavior |
3 |
|
|
|
|
|
|
Programs are instructions |
4 |
|
|
|
|
|
|
Identify inputs and outputs |
5 |
|
|
|
|
|
|
Sensors provide various types of input |
5 |
|
|
|
|
|
|
Recognizing systems |
6 |
|
|
|
|
|
|
Robotic Systems are constrained by many factors |
8 |
|
|
|
|
|
|
Probes are devices equipped with sensors |
8 |
|
|
|
|
|
|
Complex behavior can result from the interaction of
simple rules |
9 |
|
|
|
|
|

(actualização em 30/03/2026)

















.png)




.heic)
.png)





